 下载格隆汇APP
下载格隆汇APP
 下载诊股宝App
下载诊股宝App
 下载汇路演APP
下载汇路演APP
 社区
社区
 会员
会员
Nullmax 推出全栈自研的四款量产级 MaxDrive 辅助驾驶解决方案,覆盖从 SAE L2 主动安全功能到城区辅助驾驶系统,满足不同车型及市场多样化需求。
在这场辅助驾驶「全民」时代的开局之战,为什么「平台化战略」能够成为从头部车企到供应商的第一枪?
 在上海车展的交流中,Nullmax 创始人兼 CEO 徐雷博士剖析了辅助驾驶方案的发展方向,其核心观点在于移植的高效性与低成本性至关重要。
在上海车展的交流中,Nullmax 创始人兼 CEO 徐雷博士剖析了辅助驾驶方案的发展方向,其核心观点在于移植的高效性与低成本性至关重要。
他以手机市场为喻,指出不同车型如同各类手机,覆盖从低端到旗舰的广泛区间。
徐雷强调,当下亟需提升辅助驾驶方案在不同平台间的快速移植能力,针对各个细分车型市场量身定制最具竞争力的产品方案。
无论是基于一体机的国产方案还是海外方案,或是从行泊一体域控迈向舱驾一体域控方案,打造差异化优势无疑是车企优先考量的关键所在。
02、辅助驾驶「全民时代」,「从中阶到中高阶」仍是第一战场
辅助驾驶量产走向纵深,技术参数竞争正在让位于「场景理解力」。
目前辅助驾驶按场景可分为三类:
- 面向高速公路场景的高速领航辅助驾驶(高速 NOA)
- 中高阶智能辅助驾驶(高速 NOA + 城市记忆领航)
- 高阶智能辅助驾驶(全场景城市辅助驾驶)
从落地进度来看,面向高速公路场景、泊车场景为主的行泊一体域控方案渗透率最高。
高工智能汽车研究院监测数据显示,2024 年中国市场前装标配 NOA 交付 197.47 万辆,同比增长 162.31%;前装标配行泊一体域控 290.34 万台,同比增长 86.59%。
行泊一体域控方案的优势在于将行车与泊车功能集成于一体,实现资源共享与优化利用。
例如,Nullmax 的「MaxDrive Standard 行泊一体域控方案」,定位为 L2 + 辅助驾驶解决方案,车辆安全完整性达到 ASIL-D 最高等级,可实现高速 NOA,记忆行车以及记忆泊车和自动泊车功能。
 这一方案已适配 TI TDA4 系列、瑞萨 V4 系列、黑芝麻智能 A1000 及 C1236 系列等芯片平台,并实现多款车型前装量产。在 2024-2025 年,已获得多个头部主机厂/Tier1 的定点项目,开启大规模量产交付。
这一方案已适配 TI TDA4 系列、瑞萨 V4 系列、黑芝麻智能 A1000 及 C1236 系列等芯片平台,并实现多款车型前装量产。在 2024-2025 年,已获得多个头部主机厂/Tier1 的定点项目,开启大规模量产交付。
在行泊一体基础上,控制域走向驾舱融合。驾舱融合可实时处理智能座舱和高速辅助驾驶两个功能,优化算力利用率,提升辅助驾驶功能体验,降低成本。
2025 年,越来越多舱驾一体方案进入量产阶段,主要有英伟达 Thor 平台为代表的大算力路线和高通、黑芝麻平台为代表的性价比路线。
Nullmax 联合各大芯片厂商,从 8T 算力行泊一体到高通 SA8775 芯片、黑芝麻智能 C1296 芯片的舱驾一体产品,主打中低端车型市场,为客户和消费者实现最优性价比,响应「全民时代」市场需求。
Nullmax 推出的「MaxDrive Standard_Hyperlink 舱驾一体域控方案」,目前已适配主流的舱驾融合芯片,即高通 SA8775(48 TOPS 算力)与黑芝麻智能 C1296(52.5TOPS 算力)平台,并且满足 GSR 2.0, CNCAP, ENCAP 的 5 星法规要求。
在智能汽车「既要性能又要实惠」的市场趋势下,Nullmax 通过技术创新打造了一套高性价比、高度集成式的智能驾驶解决方案。
这套系统的核心优势在于精准调度芯片资源,让高通 SA8775(48TOPS)和黑芝麻 C1296(52.5TOPS)这类中端芯片发挥出顶尖水平——通过极致的优化算力利用率,充分且高效的资源调配,榨尽芯片的最后一滴算力。
其中,基于高通 SA8775 芯片打造的方案,配合 NXP S32G 芯片作为「中央协调器」,将车辆的智能驾驶、车载娱乐、车身控制、动力管理、网络通信五大系统深度打通。
例如当车辆进行记忆泊车时,不仅能自动规划路线,还会联动关闭车窗、调取环视影像、限制动力输出,形成全方位的安全防护。
这种跨系统协作能力,让 10-15 万元价位的车型也能实现支持城市通勤、跨楼层自动泊车等高端功能。
更值得关注的是,Nullmax 通过算法平台化给不同芯片准备了「万能适配器」,目前已支持高通、黑芝麻等主流芯片,正在拓展到瑞萨 X5 系列。
这意味着车企可以灵活选择不同厂商的硬件,快速开发出适应中国复杂路况、欧洲严格法规、日韩狭窄街道等全球市场需求的智能驾驶系统,帮助国产汽车品牌真正走向世界舞台。
辅助驾驶走到今天,在竞争之外,回归用户价值,从行泊一体到舱驾一体,打造全民需求的产品,服务最主流的人群,已经成为大势所趋。
03、辅助驾驶竞争,如何打造平台化能力?
如果说早期的智能驾驶竞争是单项冠军的较量,那么平台化战略的兴起则宣告了全能战士时代的来临。
当行业告别依靠某个惊艳功能博取眼球的「一招鲜」阶段,真正考验企业的是如何将感知算法、决策规划、硬件适配等核心能力模块化重组,形成可快速适配不同算力平台、不同场景需求的技术「乐高」。
这种从点状突破到体系建设的转变,本质上是对智能驾驶复杂技术生态的重构——既要保持各功能模块的技术锐度,又要构建起支撑全场景覆盖的生态基座。
那些率先完成这种「基因重组」的企业,正在将技术积累转化为可无限延伸的平台势能,在智能驾驶的全民普及浪潮中占据战略制高点。
这种基因重组的实践,在 Nullmax 的 BEV-AI 技术架构中得到了充分体现。
通过将感知、决策、规划等核心能力解耦为模块化单元,车企得以像搭建「技术乐高」一样,在不同算力平台和场景需求中自由组合。
 以动态障碍物检测(BEV - AI - OD)为例,该技术实现了 2D 目标检测和 3D 目标检测的联合检测。
以动态障碍物检测(BEV - AI - OD)为例,该技术实现了 2D 目标检测和 3D 目标检测的联合检测。
通过先进的算法和模型,能够准确识别和定位动态障碍物,如车辆、行人、自行车等,为后续的决策和规划提供可靠的数据支持。
在实际应用中,无论是在高速行驶还是城市道路复杂交通场景下,都能有效避免碰撞事故的发生,提高行车安全性。
此外,Nullmax 具备的平台化的中间件 MaxOS,可使平台化软件的 Stack 快速移植到不同芯片,提升开发效率。
Nullmax 还基于 BEV - AI 研究,探索端到端技术新形态,推出 HiP - AD 方案,达到感知规划端到端设计目标,且无需依赖大语言模型庞大参数量。
在实际应用中,BEV - AI 技术架构的优势得到了充分展现。
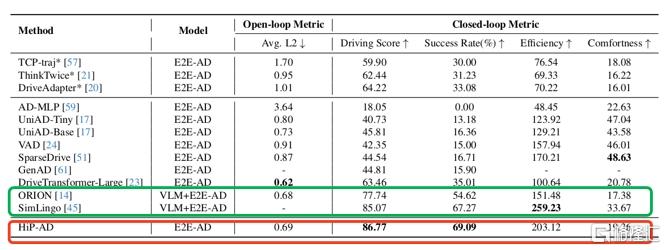 例如,在城市复杂路况测试中,Nullmax 的 HiP - AD 方案能够快速、准确地感知周围环境信息,包括车辆、行人、交通信号灯等,还能迅速规划出合理的行驶路径,面对车辆加塞、行人突然横穿马路等复杂情况时,决策既合理又及时,展现出了接近人类优秀驾驶水平的能力。
例如,在城市复杂路况测试中,Nullmax 的 HiP - AD 方案能够快速、准确地感知周围环境信息,包括车辆、行人、交通信号灯等,还能迅速规划出合理的行驶路径,面对车辆加塞、行人突然横穿马路等复杂情况时,决策既合理又及时,展现出了接近人类优秀驾驶水平的能力。
Nullmax 基于 BEV-AI 架构打造的感知中台,通过将算法能力解耦为可自由组合的模块化单元,实现了从 8TOPS 到 500+TOPS 算力平台的无缝迁移。
这种「技术乐高」式的创新,不仅将高阶智驾功能的开发周期缩短,更关键的是打破了「算力军备竞赛」的怪圈,让技术创新回归用户价值的本质。
04、决胜新维度:当算力军备竞赛转向场景理解力比拼
站在 2025 年的门槛回望,中国智能驾驶产业已走出野蛮生长的草莽阶段。
当平台化能力成为标配,未来真正的较量将转向对用户需求的精准洞察与快速响应。
一方面,辅助驾驶功能将不断向中低端车型下沉,实现更广泛的市场覆盖。
通过「平台化」战略,车企能够为不同价位段的车型提供丰富多样的辅助驾驶解决方案,让更多消费者享受到智能驾驶带来的便利和安全。
另一方面,技术的创新和突破将成为竞争的关键。
行业玩家们需要不断探索新的技术路径和架构,如端到端多模态大模型、BEV - AI 技术等,以提升辅助驾驶的智能化水平和用户体验。
当车企聚焦场景定义与用户体验时,Nullmax 这类技术供应商,正通过标准化的软件架构成为智能驾驶时代的「技术连接器」,其构建的数据闭环系统,不仅将芯片适配验证周期压缩,更通过量产数据反哺算法进化。
随着「全家桶」战略的推进和平台化能力的打造,辅助驾驶正迎来全民时代。
从行泊一体到舱驾一体及更复杂场景的辅助驾驶应用,一些头部玩家从未掉队。依靠硬核技术实力的支撑,它们仍在继续冲刺,或将走得更远。



